Colour Match
The Colour Match node can be used to correct for minor colour differences between the left and right-eye images in a stereo pair. Colour differences may occur because of different exposure or colour balance settings on a camera rig, or may be caused by different amounts of light reflecting from surfaces in the scene when viewed from each camera angle, and can cause visual discomfort when the stereo pair is viewed.
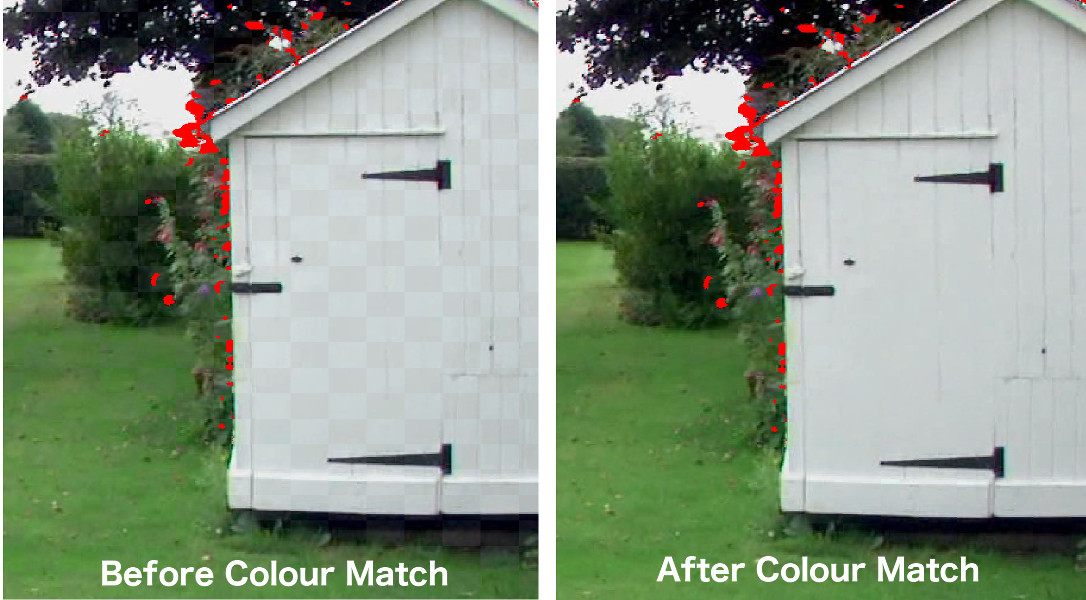
The image below shows a checkerboard comparison of a stereo pair before and after correction. Colour differences can be clearly see in the left-hand image, especially due to white balance problems. The image on the right shows the stereo pair after these differences have been corrected (Note that red pixels correspond to areas where the checkerboard comparison could not be generated due to missing disparity values. These pixels are still corrected by the colour match algorithm, however).
Usage
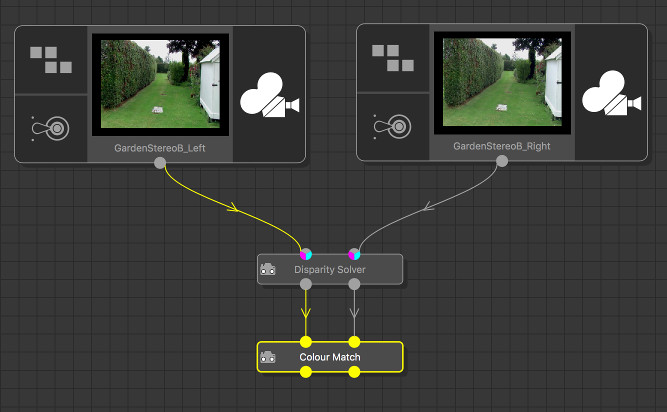
The Colour Match node uses disparity vectors generated by the Disparity Solver node to correct each frame, and therefore must be placed down-stream from a Disparity Solver node as shown in the following image.
The Colour Match node will attempt to match the colour from one eye of a stereo pair to the other eye. The Correction mode option controls whether the left eye will be corrected to match the right eye, or vice-versa.
Colour matching can be performed using two different algorithms:
The Local matching algorithm will generate set of colour transformations at various locations in the image for each frame of the clip.
The Global matching algorithm will attempt to estimate a single colour transformation that best fits all the local colour transformations in a single frame. The global transformation can be generated independently for each frame of the clip, or can be keyframed over the course of the clip if required.
The Correction detail % parameter controls the spatial density at which local colour corrections are estimated.
Controls
Current clip: Change between displaying the left or right-eye of the stereo pair.
Matching mode: The colour matching algorithm that will be used to correct the input image. The default value is Local matching which generates separate local colour corrections at different parts of the image (controlled using the Correction detail % parameter). The Global matching options will produce a single global colour transformation that is applied to the entire image.
Correction mode: Which of the left or right-eye images will be colour corrected. Options are Correct Right-Eye to match Left-Eye and Correct Left-Eye to match Right-eye.
Correction detail %: The detail at which colour correction estimates are made. The default value is 1%, and increasing this parameter will increase the spatial density at which colour correction calculations are made over the image.
Set Keyframe/Unset Keyframe: Add or remove a global matching keyframe at the current frame.
Clear Keyframes: Remove all keyframes from the clip.
Apply correction: Apply the colour match to each frame. This option can be toggled on/off to quickly assess the effectiveness of the colour correction.
Edit ROI: Allow the region of interest to be adjusted in the Cinema window using the left mouse button.
Show ROI: Display the current region of interest in the Cinema window.
Show checkerboard: Display a checkerboard image in the Cinema window combining the colour matched image from one eye with the input image from the other eye that has been warped using the disparity map.
The checkerboard can be used to evaluate the accuracy of the colour match using different matching modes and correction detail parameters. Pixels that cannot be compared because of occlusions or missing image data are shown in red.
Default Keyboard Shortcuts
| Set/Unset Keyframe | Shift+K |
| Show Checkerboard | Control+C |
| Apply Correction | Control+A |
| Next Clip | C |