Spherical Cameras
Note: As of March 27th 2023 this documentation is out of date and is no longer being maintained. Up-to-date documentation is now included in the PFTrack and PFClean software installers
This page shows some example tree layouts that can be used to track 360˚ spherical clips loaded as equirectangular panoramas. Note that tracking jobs can often be completed using various different combinations of nodes. The trees described below are for illustrative purposes only, and are not necessarily the only way each type of task can be completed.
Tracking an Equirectangular Panorama
This example shows how an equirectangular panorama can be tracked, generating six output cameras corresponding to each face of a cube map.
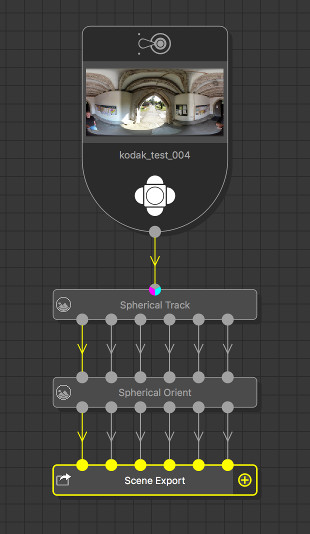
- Spherical Track node, attached to the equirectangular panorama, to track and solve the camera motion
- Spherical Orient node to adjust the relative orientation of the six planar cameras generated from the panorama.
- Scene Export node to export all six cameras and the point cloud as a single file.
Tracking a Cube Map using the Survey Solver
This example shows how one face of a spherical cube map can be tracked using the standard solvers such as the Survey Solver, and then the remaining five cameras of the cube map can be constructed automatically.
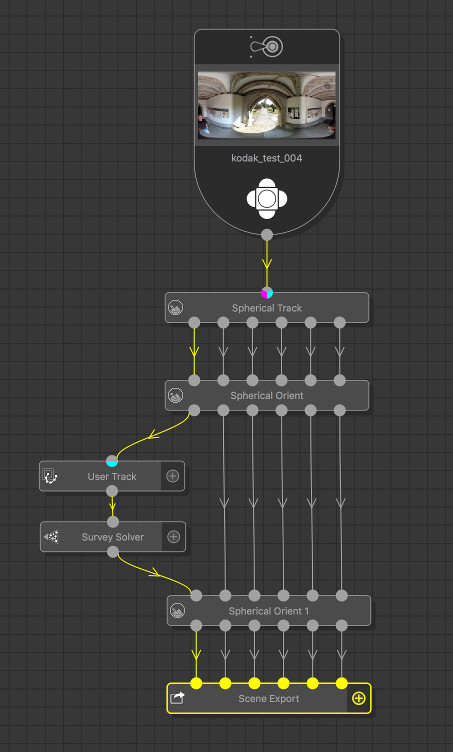
- Spherical Track node, attached to the equirectangular panorama. In this case, the Spherical Track is not used to track and solver the camera motion, but instead is being used only to cut the panorama into six clips corresponding to each face of the cube map.
- Spherical Orient node to adjust the orientation of the first clip so it points at the area of the scene that has been surveyed.
- User Track node to manually track features at surveyed data locations.
- Survey Solver node to enter 3D survey locations and solve for the camera motion of the first clip. Survey coordinates can either be entered manually, measured from imported LIDAR data, or generated from a geometric model.
- Second Spherical Orient node ("Spherical Orient 1") to re-build the position of the remaining five cameras using the camera track from the first.
- Scene Export node to export all six cameras and clips.