Stereo Cameras
Note: As of March 27th 2023 this documentation is out of date and is no longer being maintained. Up-to-date documentation is now included in the PFTrack and PFClean software installers
Note that tracking jobs can often be completed using various different combinations of nodes. The trees described below are for illustrative purposes only, and are not necessarily the only way each type of task can be completed.
- Stereo Tracking and Camera Solve
- Building a Stereo Camera after Tracking
- Adjusting Stereo Pair Images
Stereo Tracking and Camera Solve
This example shows how a stereo camera pair can be tracked and solved using the Stereo Camera Solver node
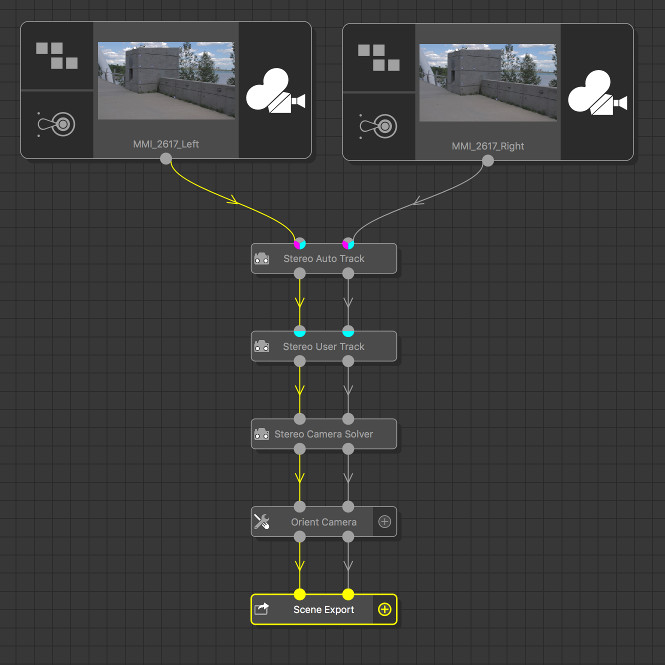
- Stereo Auto Track node to automatically track features in both the left and right-eye clips.
- Stereo User Track node to manually track additional features in both the left and right-eye clips if necessary.
- Stereo Camera Solver node to solve for both the left and right-eye camera paths and 3D tracker positions.
- Orient Camera node to orient both the cameras and ground plane for the shot.
- Scene Export node to export 3D trackers and both the left and right-eye cameras in the same scene file.
Building a Stereo Camera after Tracking
This example shows how the position of the right-eye camera in a stereo pair can be estimated after first tracking the left-eye camera.
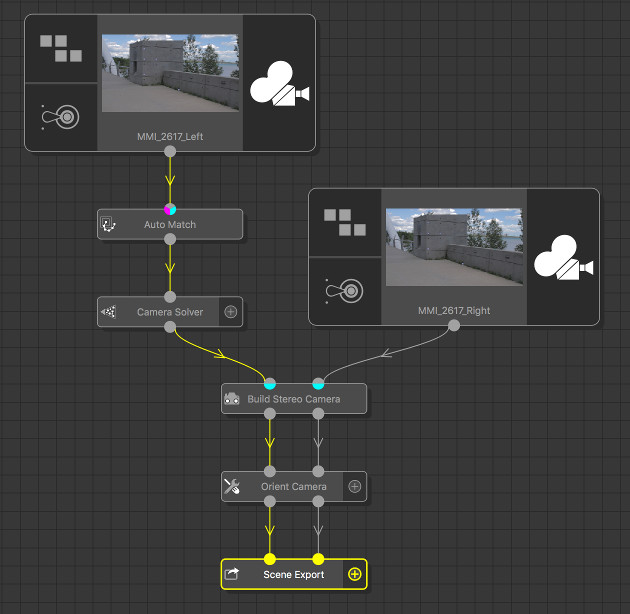
- Auto Match node to track features in the left-eye clip.
- Camera Solver node to solve for the motion of the left-eye camera.
- Build Stereo Camera node to solve for the position of the right-eye camera relative to the left-eye.
- Orient Camera node to position the ground plane.
- Scene Export node to export 3D trackers and the left and right-eye cameras in a single file.
Adjusting Stereo Pair Images
This example shows how issues such as keystone alignment errors, colour mis-matches and disparity problems can be corrected.
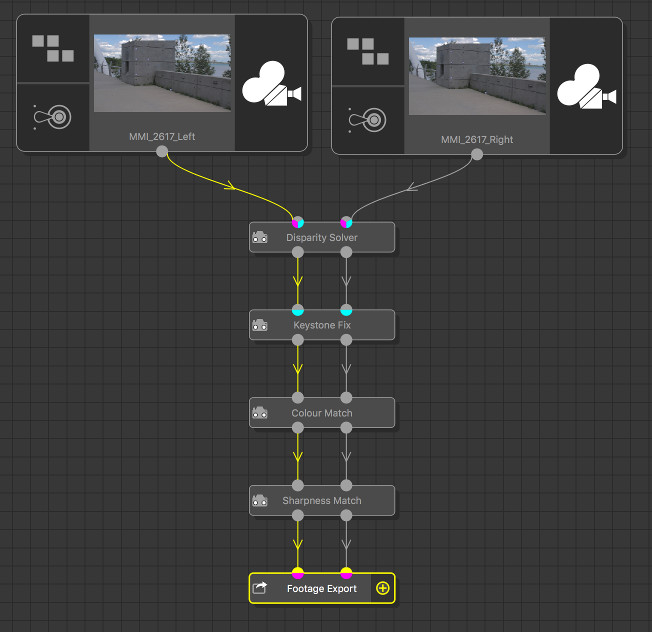
- Disparity Solver node to calculate the per pixel disparity between the left and right eye.
- Keystone Fix node to correct the vertical disparity between the left and right eye.
- Colour Match node to correct colour differences between the left and right eye clips.
- Sharpness Match node to correct differences in sharpness between the left and right eye clips.
- Footage Export node to export the corrected clips.