Z-Depth
Note: As of March 27th 2023 this documentation is out of date and is no longer being maintained. Up-to-date documentation is now included in the PFTrack and PFClean software installers
This page shows some example tree layouts that can be used to generate depth data or use z-depth for tracking. Note that tracking jobs can often be completed using various different combinations of nodes. The trees described below are for illustrative purposes only, and are not necessarily the only way each type of task can be completed.
Estimating Z-Depth for a moving camera
This example shows how Z-Depth can be estimated for a moving camera, and exported along with the camera path and point cloud.
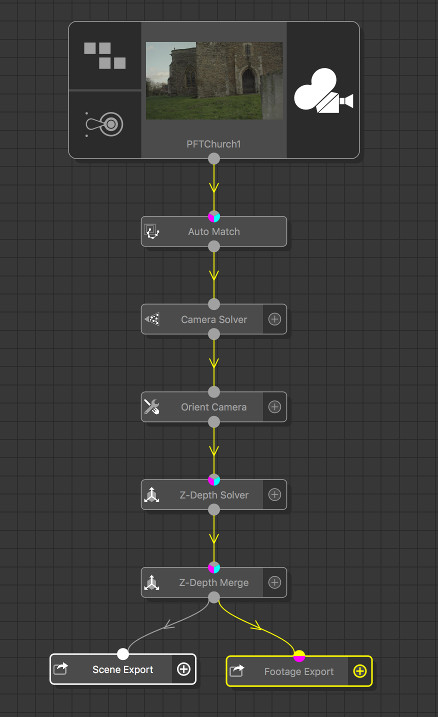
- Auto Match node to track features.
- Camera Solver node to solve for the camera motion.
- Orient Camera node to set the overall scale and orientation of the scene.
- Z-Depth Solver node, with suitable near/far planes set, to solve for a depth map at each frame.
- Z-Depth Merge node to merge the depth map data from nearby frames to reduce temporal variations.
- Scene Export node to export the camera path and point cloud.
- Footage Export node to export the depth maps.
Tracking a Camera using a Z-Channel Clip
This example shows how a Z-Channel clip can be attached to an RGB clip and used to track a camera and then build a triangular mesh from the depth data.
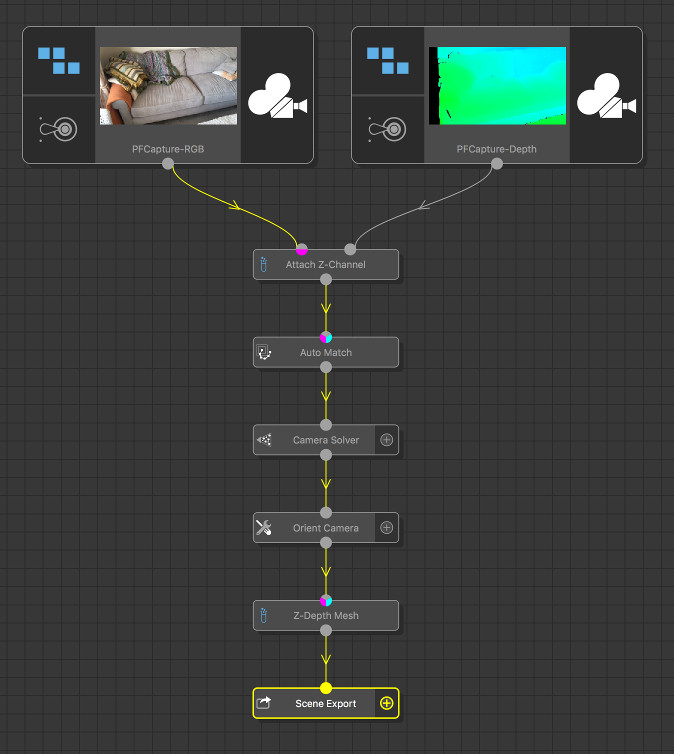
- Attach Z-Channel node, with the RGB clip connected to the first input, and the Z-Channel input clip to the second input.
- Auto Match node to track features. Each feature will receive a depth value from the Z-Channel clip.
- Camera Solver node, with the Use tracker z-depth when available option enabled, to solve for the camera motion
- Orient Camera node to set the ground plane position and rotation
- Z-Depth Mesh node to convert the depth maps into a triangular mesh
- Scene Export node to export the camera path and triangular mesh to a single file