Camera Matchmoving
Note that tracking jobs can often be completed using various different combinations of nodes. The trees described below are for illustrative purposes only, and are not necessarily the only way each type of task can be completed.
- Basic Tracking and Solving
- Using the Survey Solver
- Solving Multiple Cameras
- Camera Solve with Helper Photos
Basic Tracking and Solving
This example shows to perform basic feature tracking, solving and orienting the camera motion, and then exporting the data.
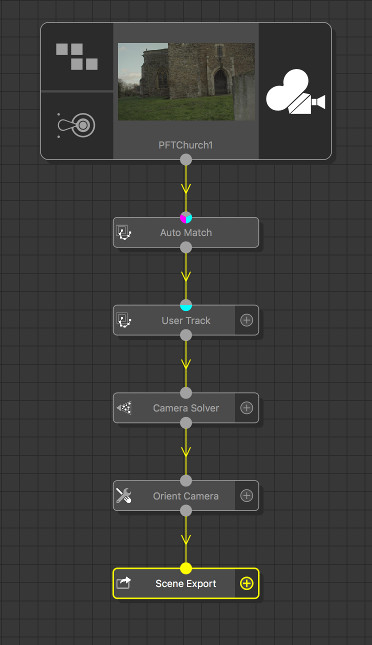
- Auto Match node to track features automatically.
- User Track node to manually track additional features.
- Camera Solver node to solve for camera motion and 3D tracker positions.
- Orient Camera node to orient the ground plane to the image.
- Scene Export node to export the camera and 3D tracker positions.
Using the Survey Solver
This example shows the use of a Survey Solver node, allowing survey coordinates to be entered manually or measured from LIDAR data.
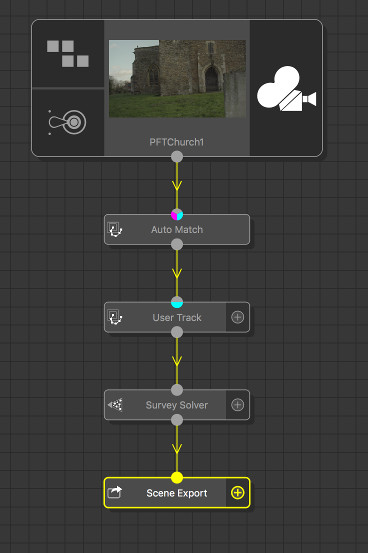
- Auto Match node to track features throughout the clip. These will be used to help reduce noise and jitters during the survey solve, reducing the need to manually track large numbers of surveyed points.
- User Track node to manually track features at surveyed data locations.
- Survey Solver node to enter 3D survey locations and solve for the camera motion. Survey coordinates can either be entered manually, measured from imported LIDAR data, or generated from a geometric model.
- Scene Export node to export the camera and surveyed tracker positions.
Solving Multiple Cameras
This example shows how a User Track node can be used to create new features and track them in more than one clip, allowing multiple cameras to be solved at the same time.
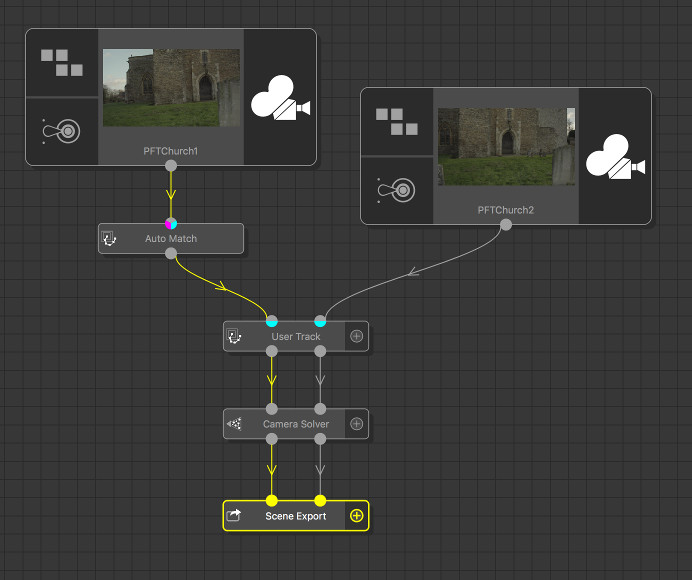
- Auto Match node to track features in the primary clip. Note that these features are only present in the primary camera, and therefore will not contribute to help solving for the secondary camera.
- User Track node to manually track each feature in both the primary clip and the secondary clip. Because these trackers have been created inside a single User Track node, they are common to both the primary and secondary cameras and can therefore be used to ensure the scale and position of the secondary camera is correct relative to the primary camera.
- Camera Solver node to solve for the 3D tracker positions and the motion of the primary and secondary cameras at the same time.
- Scene Export node to export both the primary and secondary cameras and 3D tracker positions.
Camera Solve with Helper Photos
This example shows how static 'Helper' photos can be loaded with a Photo Input and used to help solve the primary camera motion.
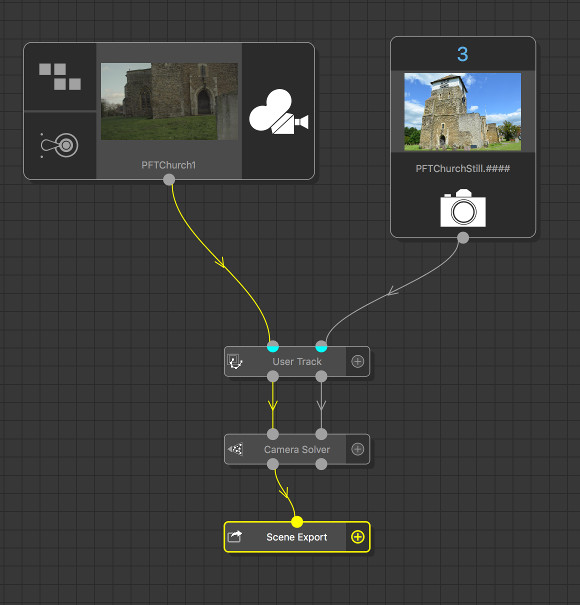
- User Track node to manually track features in the primary clip. The same trackers are also placed in the helper photos attached to the second input. Note that because these trackers were created inside the same User Track node, they will be associated with all three cameras and the helper photos can therefore be used to solve the primary camera and the helper photo cameras.
- Camera Solver node with the helper photos attached to the second input. This will solve for the 3D tracker positions and the motion path of the primary camera. The position of all helper photos will also be estimated, relative to the primary camera.
- Scene Export node to export the 3D tracker positions and the motion of the primary camera (Note that the Scene Export node is only connected to the primary camera, and therefore the helper camera positions will not be exported).